Encoder Gear Motor-25MM 95RPM
Description¶
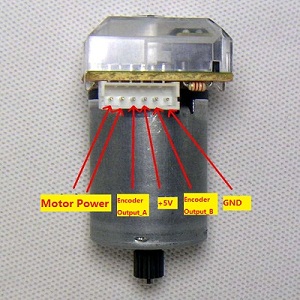
This is a gear motor that has an encoder to help users adjust the speed. The gear motor has a large torque, low loudness and easy to use. Besides, the encoder on this module has two outputs: output_A and output_B, to monitor the motor speed and direction of rotation, so that you can monitor the speed and then to adjust it in a closed-loop control.
The encoder output 2 signals with 90 degree phase difference. There will be 334 pulses on each of the signal for a round of the motor, with the rising & falling edge, you can get 334x2x2=1336 signals for a round of the motor, with a interval of 360/1336=0.2694 degree.
Model:AM2595EC

Specification¶
- Working Voltage for Motor: 6~24 VDC
- Rated Voltage for Motor: 12 VDC
- Voltage for Encoder: 5 VDC
- Motor Speed: 95 rpm@12V
- Torque: 1.1 kg.cm
- Motor Length: 65 mm
- Motor diameter: 25 mm
- Current: 250 mA
- Motor Power: 1.25W
- Weight: 86 g
Application Ideas¶
- High precision non-contact temperature measurements
- Thermal Comfort sensor for Mobile AirConditioning control system
- Temperature sensing element for residential,commercial and industrial building airconditioning
- Windshield defogging
- Automotive blind angle detection
- Industrial temperature control of moving parts
- Temperature control in printers and copiers
- Home appliances with temperature control
- Healthcare
- Livestock monitoring
- Movement detection
- Multiple zone temperature control – up to 127sensors can be read via common 2 wires
- Thermal relay / alert
- Body temperature measurement
Usage¶
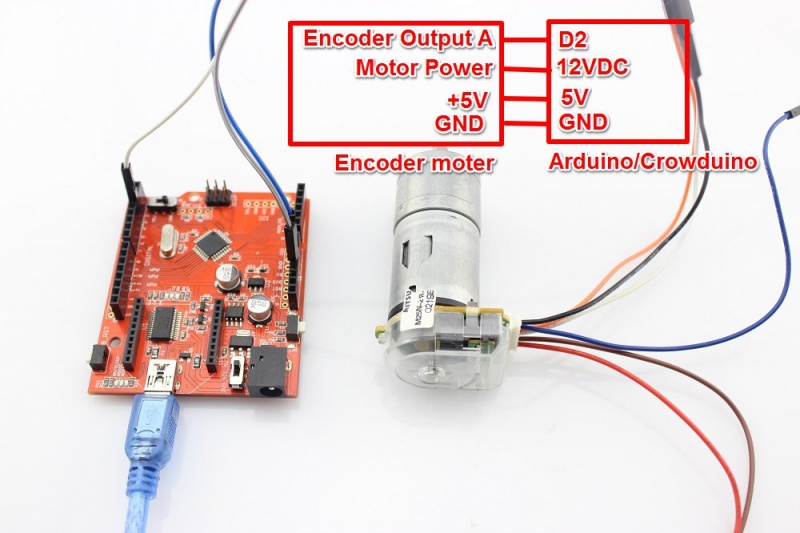
Hardware Installation¶
Demo c0de¶
1.Download the library File:Encoder Gear Motor Library
2.Unzip it into the libraries file of Arduino IDE by the path: ..\arduino-1.0\libraries.
3.Open the code directly by the path:File -> Examples ->MsTimer2 ->Encoder_Gear_Motor.
#include <MsTimer2.h>
#define ENCODER_A_PIN 2
long position;
long speed=0;
void setup(){
MsTimer2::set(1000, flash);
MsTimer2::start();
pinMode(ENCODER_A_PIN, INPUT);
attachInterrupt(0, read_quadrature, CHANGE);
Serial.begin(9600);
}
void loop(){
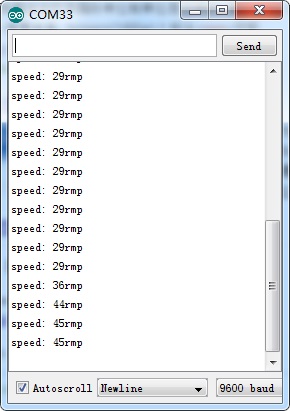
Serial.print("speed: ");
Serial.print(speed/334, DEC);
Serial.println("rmp");
delay(1000);
}
void read_quadrature(){
if (digitalRead(ENCODER_A_PIN) == LOW){
position++;
}
}
void flash()
{
speed=position;
position=0;
}
4.Open the monitor of Arduino IDE, you can see the speed of the motor.